docker 存储驱动知识归纳总结
向您推荐
Dcoker入门与实践系列文章
欢迎加入QQ技术交流群:300139299
前言
本文大部分内容,摘自docker官方文档. Understand images, containers, and storage drivers
译者没有采取原文翻译的方式,而是结合自己的学习进行了归纳总结.
要想真正的理解docker的存储驱动,需要先了解docker镜像是如何构建和存储,以及容器如何使用镜像.
镜像与分层
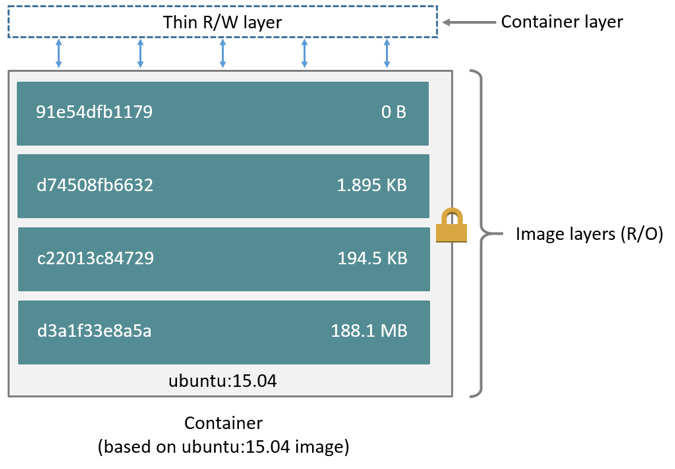
下面是ubuntu:15.04的镜像分层.一共是4层,每一层都由一些只读并且描绘系统区别的文件组成.

上下两张图对比,可以清晰的看到镜像分层关系(上图是官方文档图片,可以看到镜像大小进行了精简,但是ubuntu:15.04镜像的分层结构没变).
docker history ubuntu:15.04 IMAGE CREATED CREATED BY SIZE COMMENT d1b55fd07600 4 months ago /bin/sh -c #(nop) CMD ["/bin/bash"] 0 B <missing> 4 months ago /bin/sh -c sed -i 's/^#/s*/(deb.*universe/)$/ 1.879 kB <missing> 4 months ago /bin/sh -c echo '#!/bin/sh' > /usr/sbin/polic 701 B <missing> 4 months ago /bin/sh -c #(nop) ADD file:3f4708cf445dc1b537 131.3 MB Docker存储驱动的作用就是:将这些分层的镜像文件堆叠起来,并且提供统一的视图.使container的文件系统看上去和我们普通的文件系统没什么区别.
当创建一个新的容器的时候,实际上是在镜像的分层上新添加了一层container layer(容器层).之后所有对容器产生的修改,实际都只影响这一层.
注意
- 容器层:读写层(可写层)
- 镜像层:只读层
容器与分层
镜像与容器的一个主要区别就是,是否具有顶层的读写层(可写层).对于一个容器的数据新增,修改,都存储在可写层.当你删除一个容器的时候,可写层也将被删除(注意:可写层与数据卷的区别).然而镜像层是保持不变的.
下图展示了,多个容器共享一个镜像.镜像层是只读层,不变的.多个容器层在同一个镜像层之上,并且相互独立,互相不影响.
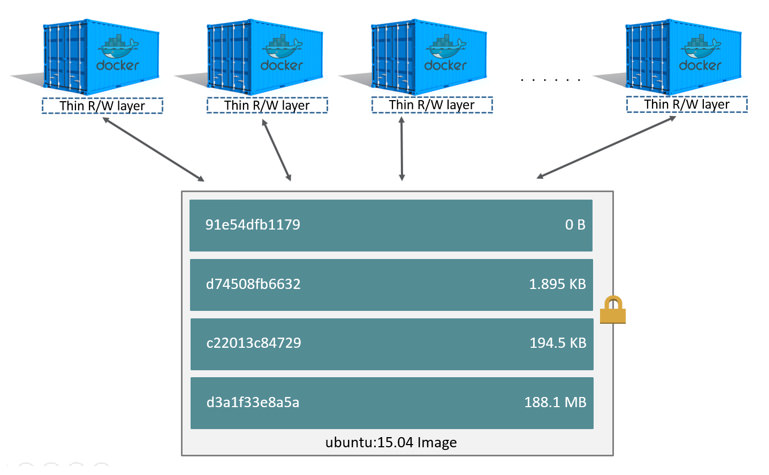
docker 存储驱动的职责就是将镜像层和可写容器层管理起来.不同的驱动实现管理的方式也不一致.实现容器与镜像管理的两个关键技术就是可堆叠的镜像层和copy-on-write (CoW,写时复制).
简述写时复制
举个例子:小文和小武由不同的老师上数学课,但是他们只有一个习题册.小文的作业是,练习册的第十一页.为了不影响到小武,小文的做法是将第11页copy,完成作业后上交.这就是一个典型的 写时复制
第一次修改一个文件,这个文件首先会从该读写层下面的只读层复制到该读写层。该文件的只读版本依然存在,但是已经被读写层中的该文件副本所隐藏。
了解了写时复制,就应该注意一个问题:如果第一次修改镜像层内包含的文件,文件的size很大.会造成大量的磁盘IO的开销.所以不建议将需要修改的大文件,集成到镜像内.可以采用数据卷的方式.
数据卷与存储驱动
当一个容器删除的时候,写入该容器的所有数据将被删除(除了保存在数据卷中的数据)
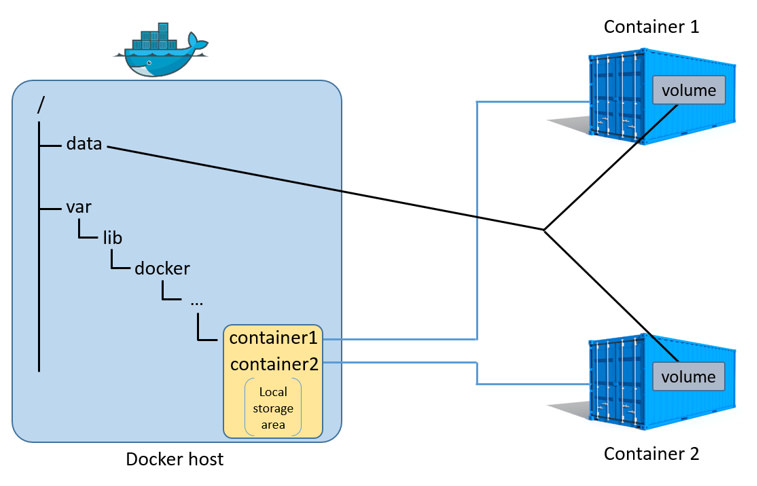
数据卷是挂载到容器的,docker宿主机上的一个目录或文件。对数据卷的文件读写是不受存储驱动控制的,接近于本地文件系统读写速度.可以挂载多个数据卷到一个容器.也可以多个容器共享一个或多个数据卷.
如图所示:一个docker宿主机运行2个容器。每个容器有自己的存储空间,存储于宿主机本地文件系统 /var/lib/docker/… 另外有一个共享的数据卷在 /data.挂载到两个容器内实现共享.
如何选择存储驱动
docker目前支持的存储驱动有:OverlayFS,AUFS,Btrfs,Device Mapper,VFS,ZFS。
- docker的存储驱动目前并没有一个通用的,完美的,适用于所有环境的存储驱动.所以需要根据自己的环境来有所选择.
- 存储驱动在不断的改进与发展
- 如果从稳定性上的考量,在安装docker的时候会默认根据你的系统环境配置选择一个存储驱动.通常来说使用这个默认的驱动将减少你遇到bug的机会.
- 如果你的团队使用过RHEL及其相关分支,你可能有关于LVM和Device Mapper的经验.这时建议你使用devicemapper存储驱动.
查看当前docker 引擎的存储驱动
#docker info Containers: 0 Running: 0 Paused: 0 Stopped: 0 Images: 24 Server Version: 1.10.2 Storage Driver: aufs Root Dir: /var/lib/docker/aufs Backing Filesystem: extfs Dirs: 52 Dirperm1 Supported: true 如图所示:存储驱动类型为aufs,宿主机文件系统的格式为extfs。
存储驱动与宿主机文件格式
| 存储驱动 | 通常被使用在(宿主机fs格式) | 不支持的fs格式 |
|---|---|---|
| overlay | ext4 xfs | btrfs aufs overlay overlay2 zfs eCryptfs |
| overlay2 | ext4 xfs | btrfs aufs overlay overlay2 zfs eCryptfs |
| aufs | ext4 xfs | btrfs aufs eCryptfs |
| btrfs | btrfs only | N/A |
| devicemapper | direct-lvm | N/A |
| vfs | debugging only | N/A |
| zfs | zfs only | N/A |
设置docker的存储驱动
- 方法一:如设置存储驱动的类型为devicemapper
$ dockerd --storage-driver=devicemapper & - 方法二:如设置存储驱动的类型为devicemapper,在DOCKER_OPTS配置参数的最后面加上–storage-driver=devicemapper
vim /etc/default/docker DOCKER_OPTS="<其他配置项> --storage-driver=devicemapper" 现状与未来
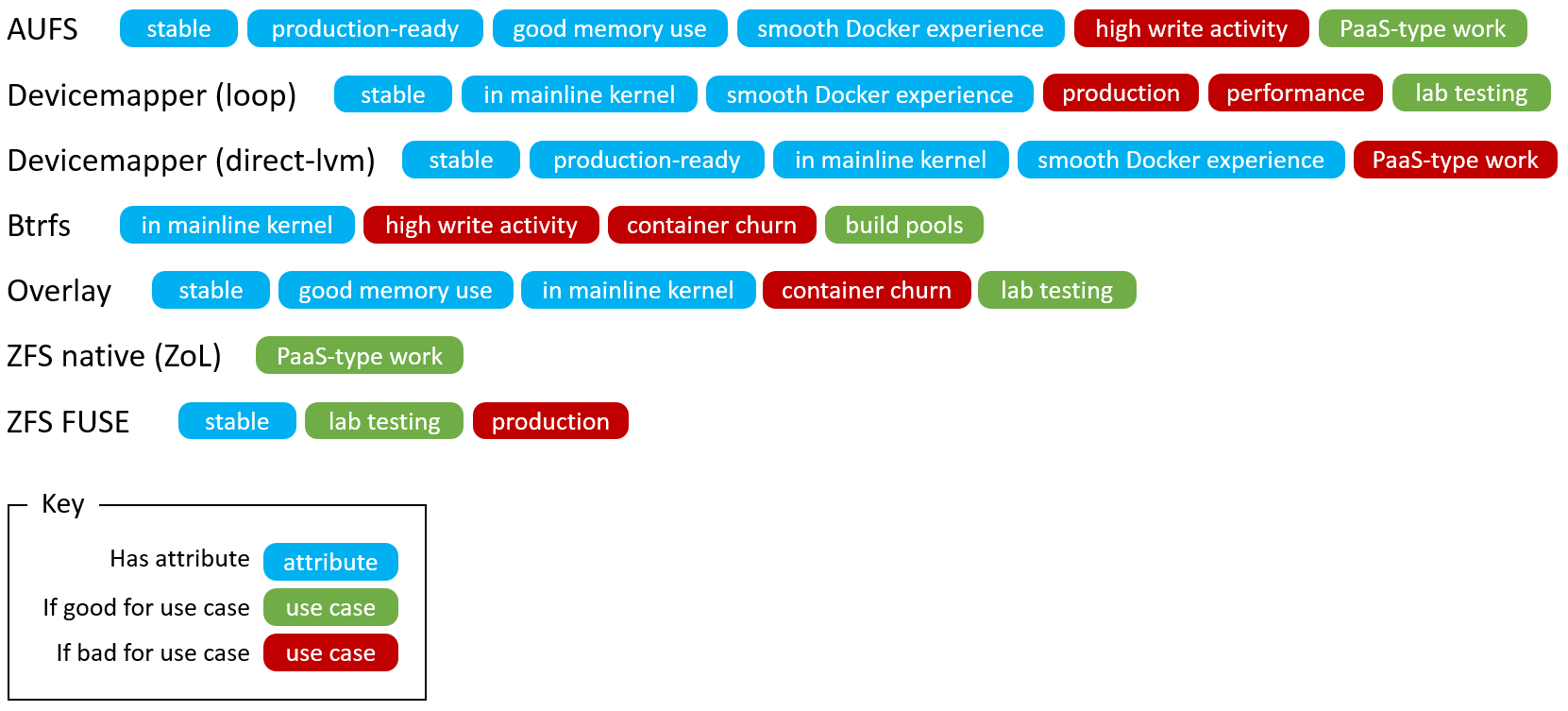
许多人认为OverlayFS是Docker存储驱动的未来.然而,它仍然不够成熟.稳定性上也不如一些成熟的存储驱动,如:AUFS,devicemapper.
下面的图表,显示了每个存储驱动的优势以及不足,请参考:
具体到某一个存储驱动
这部分介绍具体的存储驱动的实现方式,对于技术研究者可以参考学习.对于应用实践者,可以暂时止步.笔者看了这部分内容,没有进行翻译总结.留下待以后完成.
AUFS
Docker and AUFS in practice
device mapper
Docker and the Device Mapper storage driver
写于
2016年6月21日 发布于:字母哥博客
docker技术日新月异,文中内容可能时刻发生变化.
正文到此结束
热门推荐










相关文章






Loading...
![[HBLOG]公众号](http://www.liuhaihua.cn/img/qrcode_gzh.jpg)

