万锁之母AbstractQueuedSynchronizer
翻看Java“锁”记中提到的各种“锁”,其内部同步实现大多数都和一个类 AbstractQueuedSynchronizer 相关,这个类称得上“万锁之母”,所以今天就来扒一扒这个类。
整体脉络
为了避免一头扎进去纠缠于各种细节出不来,可以先从宏观上来看一下这个类。首先大家思考一个问题:什么是同步器?假如把线程比作车辆,同步器的角色和警察叔叔差不多,警察的做的事无非是在合适的时机指挥车辆走和停,同步器呢,也是在选择合适的时间调度线程阻塞和执行。
对于车辆来说,什么时候走什么时候停呢,警察叔叔给你招手的时候啊,来来来小伙子,否则就老老实实排队,等警察叔叔给你招手;对于线程来讲也可以采用这种策略,获得许可可以执行,否则排队阻塞,等同步器给与你许可。如果前方交通比较疏松,警察可能一次会叫好几辆车一起走,如果比较拥堵,则会一辆一辆的来;同步器呢同样如此,它有两种模式:共享和独占,前者允许多个线程一起运行,后者只允许单一线程运行。
如果用伪代码表示上面的逻辑可能是这样子的:
// 获得许可
while (不允许获得许可) {
线程排队
停止执行
}
从队伍里出来继续执行
// 释放许可
if (允许释放许可) {
释放许可
叫醒排队的线程
}
经过上面的分析大致可以提炼出同步器要解决这么几点:
- 许可怎么获取和释放
- 线程采用什么方法停止和继续执行
- 对于不能立马获得许可的线程得有排队机制
源码分析
说是源码分析其实是自己在学习 AbstractQueuedSynchronizer 源码的一些学习笔记,并不是完整的源码分析。相信想了解 AbstractQueuedSynchronizer 运行机制的人多多少少都看过它的代码了,甚至看了一遍都不止,其实大部分代码一般人都能看懂,就是有那么几处难懂的代码,犹如芒刺在背不拔不快。本文就是为了这个目的而写的,并不是要面面俱到而是重点突破,给有心人一点启发。为了符合上下文的语义,下面描述的时候可能节点和线程交替使用,也会把阻塞停止,唤醒叫醒混用,大家留意就是了。
AbstractQueuedSynchronizer 整体是利用模板模式,通过维护一个 state 变量状态配合 tryAcquire , tryRelease 以及 tryAcquireShared , tryReleaseShared 间接的影响许可获取和释放。
同步器使用CLH队列来维护排队的线程,CLH队列说白了就是一个单向链表,特性是后一个节点的状态是由前一个节点的状态决定的,每个节点都有一个 pred 指针指向前一个节点, AbstractQueuedSynchronizer 在原生的CLH队列基础上进行了优化,加入了一个 next 指针,指向后继节点,用于提高寻找后继节点的性能,这就形成了一个双向链表。由于没有更新两个 volatile 的变量的CAS方法,所以 next 变量为 null 的时候并不表明没有后继节点,因为有可能一个节点入列的时候更新完 pred 指针,还没来得及更新 next 指针。具体结构如下:
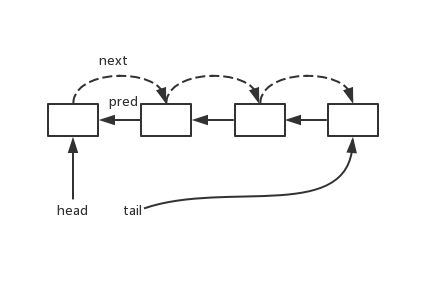
head 和 tail 分别指向队列的头和尾, next 我这里画成了虚线,表明其不可靠性。
AbstractQueuedSynchronizer 的核心就是如何维护CLH队列的状态,所以我们把重点放在这一块。它提供了两套获取许可和释放许可的方法: acquire , release 和 acquireShared , releaseShared ,分别对应独占和共享模式。下面分别看看这两套方法的签名:
// 独占模式模板方法
public final void acquire(int arg) {
if (!tryAcquire(arg) &&
acquireQueued(addWaiter(Node.EXCLUSIVE), arg))
selfInterrupt();
}
public final boolean release(int arg) {
if (tryRelease(arg)) {
Node h = head;
if (h != null && h.waitStatus != 0)
unparkSuccessor(h);
return true;
}
return false;
}
// 共享模式模板方法
public final void acquireShared(int arg) {
if (tryAcquireShared(arg) < 0)
doAcquireShared(arg);
}
public final boolean releaseShared(int arg) {
if (tryReleaseShared(arg)) {
doReleaseShared();
return true;
}
return false;
}
可以看到这两套方法是非常类似的,我们一个一个的看看,首先看看 acquire 方法:
// acquire方法的逻辑粗看起来可能是先尝试获取下许可
// 如果成功,直接跳出,不用排队了;
// 如果不成功就添加一个独占节点到队列中排队,如果
// 有中断响应中断,细节一个方法一个方法的进入看看
public final void acquire(int arg) {
if (!tryAcquire(arg) &&
acquireQueued(addWaiter(Node.EXCLUSIVE), arg))
selfInterrupt();
}
// 尝试获取许可,成功返回true,这个方法没有实现
// 而是留给子类去实现,因为不同的锁获取和释放
// 许可的语义是不同的无法一概而论,所以交由
// 具体的子类去实现,这是典型的模板模式
// 之所以没有用抽象方法,是因为同步器
// 允许只实现独占和共享的一种,如果是
// 抽象方法,则需要实现两套模式的方法
protected boolean tryAcquire(int arg) {
throw new UnsupportedOperationException();
}
// 从名字上也可以看出这个方法就是往队伍里添加节点进行排队
private Node addWaiter(Node mode) {
// 以当前线程建立一个新的节点,准备插到队伍里
Node node = new Node(Thread.currentThread(), mode);
// Try the fast path of enq; backup to full enq on failure
// 这句是原生英文注释,大意是先尝试快速的路径入队,如果失败
// 再用完整的入队方法,为什么这里是快呢?先别急,先往下看
Node pred = tail;
// pred != null 说明队伍里已有排队者
if (pred != null) {
node.prev = pred;
// 使用CAS操作将当前节点插到队伍里,注意这个时候可能
// 会有多个线程在同时往里插队,但是CAS操作能确保同一
// 时间只有一个线程会成功
if (compareAndSetTail(pred, node)) {
pred.next = node;
return node;
}
}
enq(node);
return node;
}
// 这就是所谓的完整的入队方法
private Node enq(final Node node) {
for (;;) {
Node t = tail;
// 也就是队列还没有初始化呢,将head和
// tail都初始化为一个哑节点
if (t == null) { // Must initialize
if (compareAndSetHead(new Node()))
tail = head;
} else {
// 看这段代码是不是很眼熟了呢,对
// 这块和快速入队方法基本一样,对比快速和完整
// 两种入队方法,快速的没有初始化判断,
// 少了循环,不会重试,相对来说会“快”点
node.prev = t;
if (compareAndSetTail(t, node)) {
t.next = node;
return t;
}
}
}
}
// 这个方法的大意是如果获得了许可,赶紧出队执行,否则告诉你的
// 前继节点轮到你时叫你,然后老老实实排队等待
final boolean acquireQueued(final Node node, int arg) {
boolean failed = true;
try {
boolean interrupted = false;
for (;;) {
// 获得node的前继节点
final Node p = node.predecessor();
// 如果前继节点是头而且尝试获取许可成功
// 也就是轮到node出列执行了,即警察叔叔
// 给你招手了
if (p == head && tryAcquire(arg)) {
setHead(node);
p.next = null; // help GC
failed = false;
return interrupted;
}
// 这里是判断是否需要阻塞,需要的话就要调用
// park方法将线程歇一会,等unpark叫醒线程
// 的时候会检查中断状态,如果有中断就响应
// 中断
if (shouldParkAfterFailedAcquire(p, node) &&
parkAndCheckInterrupt())
interrupted = true;
}
} finally {
// 如果tryAcquire抛出异常
if (failed)
cancelAcquire(node);
}
}
// 这段代码的大意是节点node给前面的节点pred说哥们我先睡会,到站叫我,pred
// 说好(设置为SIGNAL状态),到站之后叫你,你放心睡吧
private static boolean shouldParkAfterFailedAcquire(Node pred, Node node) {
int ws = pred.waitStatus;
// 如果前继节点的状态是SIGNAL,表明node已经告诉pred到站叫他,
// 而且pred也已经答应了,所以node可以放心的去睡了
if (ws == Node.SIGNAL)
return true;
if (ws > 0) {
// 这里是删除取消的节点,因为只有CANCEL的节点是大于0
do {
node.prev = pred = pred.prev;
} while (pred.waitStatus > 0);
pred.next = node;
} else {
// node告诉pred到站叫它
compareAndSetWaitStatus(pred, ws, Node.SIGNAL);
}
return false;
}
// 这个方法很简单,没啥好说的,就是去睡觉,醒来
// 之后看看手机有没有人找你(中断)
private final boolean parkAndCheckInterrupt() {
LockSupport.park(this);
return Thread.interrupted();
}
acquire 分析完了,再看看 release
// 如果释放许可成功,并且后面还有节点,叫醒它
// 返回
public final boolean release(int arg) {
if (tryRelease(arg)) {
Node h = head;
// 如果后面还有节点
// waitStatus会被设置成SIGNAL,忘记的话可以再
// 看看前面的shouldParkAfterFailedAcquire方法
if (h != null && h.waitStatus != 0)
unparkSuccessor(h);
return true;
}
return false;
}
// 叫醒后面的哥们一次
private void unparkSuccessor(Node node) {
int ws = node.waitStatus;
// 如果ws小于0,也就是没有取消,将ws置位0
// 也就是打算叫醒后面的节点,同时把提醒
// 状态复位,免得叫醒多次
if (ws < 0)
compareAndSetWaitStatus(node, ws, 0);
Node s = node.next;
// 如果后面可能没节点了或者节点是取消的
// 就从后往前找,如果能找到紧随node之后
// 并且没有取消的节点就叫醒它。这里就是
// 利用next的优化了,即如果next不为空
// 且没有取消那么直接叫醒next,如果
// next为空,不能认定后面就没有节点了
// 因为next是不可靠的,要利用可靠的pred从后
// 往前找
if (s == null || s.waitStatus > 0) {
s = null;
for (Node t = tail; t != null && t != node; t = t.prev)
if (t.waitStatus <= 0)
s = t;
}
if (s != null)
LockSupport.unpark(s.thread);
}
独占模式的获取和释放代码就分析完了,再来看看共享模式的。
public final void acquireShared(int arg) {
if (tryAcquireShared(arg) < 0)
doAcquireShared(arg);
}
// 返回值小于0表示获取失败
// 等于0表示获取许可成功但是后面节点无法再获取了
// 大于0表示获取许可成功并且后面节点还可以再获取
protected int tryAcquireShared(int arg) {
throw new UnsupportedOperationException();
}
// 粗看doAcquireShared和acquireQueued非常相似,
// 主要是两点不同,一是一个添加的是独占节点,
// 一个添加的是共享节点,另一点不同是
// 一个是setHead,一个是setHeadAndPropagate
private void doAcquireShared(int arg) {
final Node node = addWaiter(Node.SHARED);
boolean failed = true;
try {
boolean interrupted = false;
for (;;) {
final Node p = node.predecessor();
if (p == head) {
int r = tryAcquireShared(arg);
if (r >= 0) {
setHeadAndPropagate(node, r);
p.next = null; // help GC
if (interrupted)
selfInterrupt();
failed = false;
return;
}
}
if (shouldParkAfterFailedAcquire(p, node) &&
parkAndCheckInterrupt())
interrupted = true;
}
} finally {
if (failed)
cancelAcquire(node);
}
}
// 可以看到setHeadAndPropagate不光像独占模式那样修改了队列的头,
// 还会在某些条件下调用一个doReleaseShared方法
private void setHeadAndPropagate(Node node, int propagate) {
Node h = head; // Record old head for check below
setHead(node);
// 后续节点还有获取许可的机会或者节点没有取消
if (propagate > 0 || h == null || h.waitStatus < 0 ||
(h = head) == null || h.waitStatus < 0) {
Node s = node.next;
// 不知道s是什么类型或者s是共享节点
if (s == null || s.isShared())
doReleaseShared();
}
}
// 在并发的条件下叫醒队列头部的线程
private void doReleaseShared() {
for (;;) {
Node h = head;
if (h != null && h != tail) {
// 这部分代码和独占模式的release方法几乎一样
// 也是把队列头的线程叫醒继续执行,但要注意
// 一个重要区别是这里使用的是CAS操作,上面
// 独占不是,这是为什么呢?还记得独占和共享
// 的定义吗?对于共享模式多个线程同时执行
// 同时也有可能多个线程同时释放,所以必须
// 使用CAS操作保证线程安全
int ws = h.waitStatus;
if (ws == Node.SIGNAL) {
if (!compareAndSetWaitStatus(h, Node.SIGNAL, 0))
continue; // loop to recheck cases
unparkSuccessor(h);
}
// 这个分支啥时候会满足呢?根据上面的分析在入队的时候
// 会调用shouldParkAfterFailedAcquire将前继节点的状态
// 修改为SIGNAL,这里为0应该发生在头节点没有后继节点
// 或者后继节点调用shouldParkAfterFailedAcquire
// 还没返回的时候,再加上这个条件:
// !compareAndSetWaitStatus(h, 0, Node.PROPAGATE)
// 那么就剩下了一种情况:头结点的后继节点调用
// shouldParkAfterFailedAcquire还没把头节点
// 的状态修改成SIGNAL的时候。如果没有这个分支
// 只能等待下一次的doReleaseShared的调用才能
// 将头部的线程叫醒了
else if (ws == 0 &&
!compareAndSetWaitStatus(h, 0, Node.PROPAGATE))
continue; // loop on failed CAS
}
// 这句意思是头没变就跳出,那头啥时候变呢,就是出队的时候
// 也就是有线程已经出队,有责任叫醒新的头节点线程
if (h == head) // loop if head changed
break;
}
}
// 可以看到释放许可的主逻辑就是doReleaseShared
// 上文已经分析过在此不再赘述
public final boolean releaseShared(int arg) {
if (tryReleaseShared(arg)) {
doReleaseShared();
return true;
}
return false;
}
运行图景
经过上面的源码分析,估计大部分人心里有点数了,可能还形不成清晰的运行图景或者说直觉性的认识,那么接下来说下我自己的一点理解。
整个的图景是这样子的:对于独占模式,因为只有一个线程能获取许可,进而也只有一个线程释放许可,只会叫醒队伍头部的一个线程,这样整个队列是 串行出列,并行入列 ,有点像排队坐公交,虽然队伍后面挤作一团,队伍前面还是有序的,一个一个的上车;对于共享模式而言,由于允许多个线程一起运行,也就是多个线程获得许可,同样也会有多个线程释放许可,这就需要叫醒队伍里多个线程,整个队列的样子是 并行出列,并行入列 。
忽略不必要的细节,来看看独占和共享模式下主逻辑的函数调用栈:
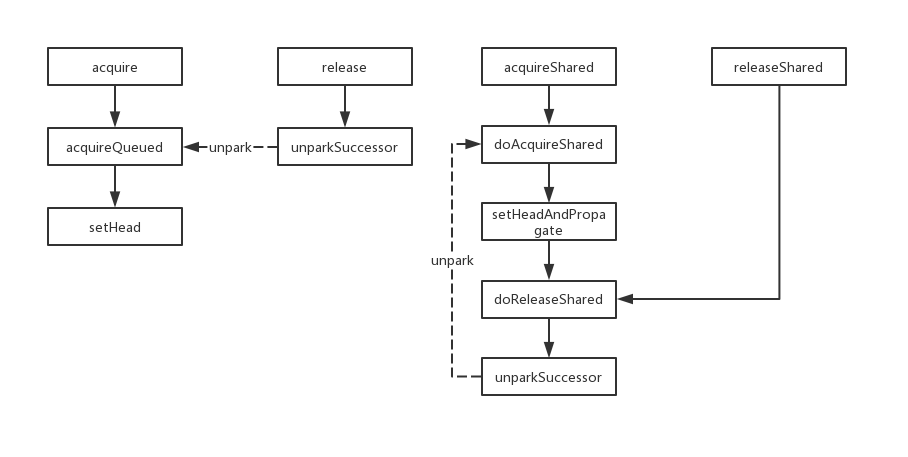
上图左边是独占模式的调用栈,右边是共享模式的调用栈。可以清晰看到为啥共享模式的可以唤醒多个节点,是因为它的调用栈形成了一个环,这样它就不会不停地叫醒后面的共享节点,就像一个连锁反应,并且获取许可和释放许可都会启动这个连锁反应;而独占模式没有形成环,叫醒一个节点就返回了,并且由于共享模式下获取和释放许可都会调用doReleaseShared,二者会形成竞争,这也是doReleaseShared内部使用CAS操作的一个原因。
参考资料:
- JAVA并发编程实战
- Doug Lea, The java.util.concurrent Synchronizer Framework
正文到此结束
热门推荐










相关文章

近期评论
-
你这基本没有更新呀,最近文章显示还是2019年的文章。不符合要求哈
-
关键词:慕云博客 链接:https://www.lilun.me 描述:分享原创文字的个人博客
-
-
-
可以提供一下源码吗
-
不是商业站,鸡娃学习笔记
-
-
-
-
听他们说很厉害的样子
Loading...
![[HBLOG]公众号](http://www.liuhaihua.cn/img/qrcode_gzh.jpg)

