Android HAL模块实现
1. HAL介绍
Android的HAL(Hardware Abstract Layer硬件抽象层)是为了保护一些硬件提供商的知识产权而提出的,是为了避开linux的GPL束缚。思路是把控制硬件的动作都放到了Android HAL中,而linux driver仅仅完成一些简单的数据交互作用,甚至把硬件寄存器空间直接映射到user space。而Android是基于Aparch的license,因此硬件厂商可以只提供二进制代码,所以说Android只是一个开放的平台,并不是一个开源的平台。
总结下来,Android HAL存在的原因主要有:
- 并不是所有的硬件设备都有标准的linux kernel的接口
- KERNEL DRIVER涉及到GPL的版权。某些设备制造商并不原因公开硬件驱动,所以才去用HAL方式绕过GPL。
- 针对某些硬件,Android有一些特殊的需求。
- 不同的平台厂商可在遵循HAL调用接口的前提下实现自己的HAL,不会影响到上层的调用者,这样降低了模块间的耦合度,可以让平台开发者只关心HAL本身的实现即可。
下图是HAL在android系统中所处的位置:

从这张图中可以看出,HAL把内核和framework隔离开来,使上层的开发可以不依赖内核与驱动的实现。在android源码中,HAL大致位于下面几个位置:
- libhardware_legacy/ - 旧的架构、采取链接库模块的模式进行。
- libhardware/ - 新架构、调整为 HAL stub 的概念。
- ril/ - Radio Interface Layer。
- msm7k QUAL平台相关。
主要包含以下一些模块:Gps、Vibrator、Wifi、Copybit、Audio、Camera、Lights、Ril、Gralloc等。
2. HAL的两种实现方式
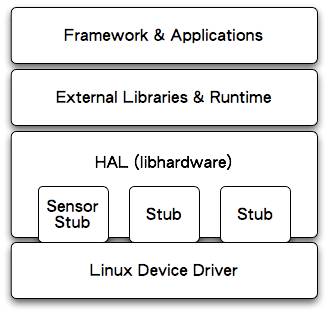
下图分别为旧的HAL实现与新的HAL实现框图:
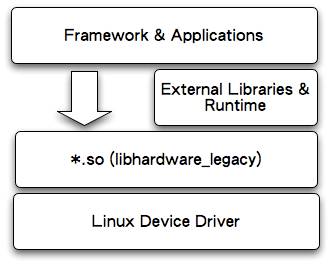
libhardware_legacy 是将 *.so 文件当作shared library来使用,在runtime(JNI 部份)以 direct function call 使用 HAL module。通过直接函数调用的方式,来操作驱动程序。当然,应用程序也可以不需要通过 JNI 的方式进行,直接加载 *.so (dlopen)的做法调用*.so 里的符号(symbol)也是一种方式。总而言之是没有经过封装,上层可以直接操作硬件。
现 在的 libhardware 作法,就有「stub」的味道了。HAL stub 是一种代理人(proxy)的概念,stub 虽然仍是以 *.so檔的形式存在,但 HAL 已经将 *.so 档隐藏起来了。Stub 向 HAL「提供」操作函数(operations),而 runtime 则是向 HAL 取得特定模块(stub)的 operations,再 callback 这些操作函数。这种以 indirect function call 的实作架构,让HAL stub 变成是一种「包含」关系,即 HAL 里包含了许许多多的 stub(代理人)。Runtime 只要说明「类型」,即 module ID,就可以取得操作函数。对于目前的HAL,可以认为Android定义了HAL层结构框架,通过几个接口访问硬件从而统一了调用方式。
由上可大致看出这两种实现方式的优劣:
HAL_legacy方式的HAL是一个模块,采用共享库形式,在编译时会调用到。由于采用function call形式调用,因此可被多个进程使用,但会被mapping到多个进程空间中,造成浪费,同时需要考虑代码能否安全重入的问题(thread safe)。而新式的HAL采用HAL module和HAL stub结合形式,HAL stub不是一个share library,编译时上层只拥有访问HAL stub的函数指针,并不需要HAL stub。上层通过HAL module提供的统一接口获取并操作HAL stub,so文件只会被mapping到一个进程,也不存在重复mapping和重入问题。
3. HAL模块的结构与编写方法
HAL模块主要有二个结构:
struct hw_module_t-代表抽象硬件模块,包含硬件模块的一些基本信息,例如版本号,开发者等,还有一个成员函数结构体。
struct hw_module_methods_t ,里面只有一个用于打开抽象硬件设备hw_device_t的open函数指针。
struct hw_device_t-代表抽象硬件设备,里面包含了版本号,一个关闭硬件的close函数指针,以及一个指向hw_module_t的结构的指针。
这两个结构的定义在hardware/libhardware/include/hardware/hardware.h里面,在实现自己的hw module与hw device结构时,第一个成员变量必须是这两个结构,以达到类似C++中的继承的目的。
这两个结构的定义如下所示:
typedef struct hw_module_t { /** tag must be initialized to HARDWARE_MODULE_TAG */ uint32_t tag; /** * The API version of the implemented module. The module owner is * responsible for updating the version when a module interface has * changed. * * The derived modules such as gralloc and audio own and manage this field. * The module user must interpret the version field to decide whether or * not to inter-operate with the supplied module implementation. * For example, SurfaceFlinger is responsible for making sure that * it knows how to manage different versions of the gralloc-module API, * and AudioFlinger must know how to do the same for audio-module API. * * The module API version should include a major and a minor component. * For example, version 1.0 could be represented as 0x0100. This format * implies that versions 0x0100-0x01ff are all API-compatible. * * In the future, libhardware will expose a hw_get_module_version() * (or equivalent) function that will take minimum/maximum supported * versions as arguments and would be able to reject modules with * versions outside of the supplied range. */ uint16_t module_api_version; #define version_major module_api_version /** * version_major/version_minor defines are supplied here for temporary * source code compatibility. They will be removed in the next version. * ALL clients must convert to the new version format. */ /** * The API version of the HAL module interface. This is meant to * version the hw_module_t, hw_module_methods_t, and hw_device_t * structures and definitions. * * The HAL interface owns this field. Module users/implementations * must NOT rely on this value for version information. * * Presently, 0 is the only valid value. */ uint16_t hal_api_version; #define version_minor hal_api_version /** Identifier of module */ const char *id; /** Name of this module */ const char *name; /** Author/owner/implementor of the module */ const char *author; /** Modules methods */ <strong> struct hw_module_methods_t* methods;</strong> /** module's dso */ <strong> void* dso;</strong> /** padding to 128 bytes, reserved for future use */ uint32_t reserved[32-7]; } hw_module_t; typedef struct hw_module_methods_t { /** Open a specific device */ int (*open)(const struct hw_module_t* module, const char* id, struct hw_device_t** device); } hw_module_methods_t; /** * Every device data structure must begin with hw_device_t * followed by module specific public methods and attributes. */ typedef struct hw_device_t { /** tag must be initialized to HARDWARE_DEVICE_TAG */ uint32_t tag; /** * Version of the module-specific device API. This value is used by * the derived-module user to manage different device implementations. * * The module user is responsible for checking the module_api_version * and device version fields to ensure that the user is capable of * communicating with the specific module implementation. * * One module can support multiple devices with different versions. This * can be useful when a device interface changes in an incompatible way * but it is still necessary to support older implementations at the same * time. One such example is the Camera 2.0 API. * * This field is interpreted by the module user and is ignored by the * HAL interface itself. */ uint32_t version; /** reference to the module this device belongs to */ <strong>struct hw_module_t* module;</strong> /** padding reserved for future use */ uint32_t reserved[12]; /** Close this device */ <strong>int (*close)(struct hw_device_t* device);</strong> } hw_device_t; 4. 硬件模块库的使用
硬件模块库的装载与解析由hardware.c中的hw_get_module函数完成,它先按照一定的规则选择然后加载硬件模块库,然后由HAL_MODULE_INFO_SYM解析出库中的全局变量名,得到硬件模块库指针(hw_module_t结构),然后返回给调用者。
下面以camera为例子来说明如何使用HAL层。
在系统启动创建CameraService对象时,其函数onFirstRef被调用,在它里面,通过hw_get_module(CAMERA_HARDWARE_MODULE_ID, (const hw_module_t**)&mModule)函数获取camera的抽象硬件模块camera_module,其过程如上所说,通过Camera的HAL动态库然后解析HAL_MODULE_INFO_SYM符号得到全局变量,然后通过获取到的抽象硬件模块结构获取系统拥有的Camera数量等。具体代码参见CameraService.cpp。
其中camera_module即camera HAL的抽象硬件模块,其定义如下(camera_common.h):
typedef struct camera_module { hw_module_t common; /** * get_number_of_cameras: * * Returns the number of camera devices accessible through the camera * module. The camera devices are numbered 0 through N-1, where N is the * value returned by this call. The name of the camera device for open() is * simply the number converted to a string. That is, "0" for camera ID 0, * "1" for camera ID 1. * * The value here must be static, and cannot change after the first call to * this method */ int (*get_number_of_cameras)(void); /** * get_camera_info: * * Return the static camera information for a given camera device. This * information may not change for a camera device. * */ int (*get_camera_info)(int camera_id, struct camera_info *info); /** * set_callbacks: * * Provide callback function pointers to the HAL module to inform framework * of asynchronous camera module events. The framework will call this * function once after initial camera HAL module load, after the * get_number_of_cameras() method is called for the first time, and before * any other calls to the module. * * Version information (based on camera_module_t.common.module_api_version): * * CAMERA_MODULE_API_VERSION_1_0, CAMERA_MODULE_API_VERSION_2_0: * * Not provided by HAL module. Framework may not call this function. * * CAMERA_MODULE_API_VERSION_2_1: * * Valid to be called by the framework. * */ int (*set_callbacks)(const camera_module_callbacks_t *callbacks); /** * get_vendor_tag_ops: * * Get methods to query for vendor extension metadata tag information. The * HAL should fill in all the vendor tag operation methods, or leave ops * unchanged if no vendor tags are defined. * * Version information (based on camera_module_t.common.module_api_version): * * CAMERA_MODULE_API_VERSION_1_x/2_0/2_1: * Not provided by HAL module. Framework may not call this function. * * CAMERA_MODULE_API_VERSION_2_2: * Valid to be called by the framework. */ void (*get_vendor_tag_ops)(vendor_tag_ops_t* ops); /* reserved for future use */ void* reserved[8]; } camera_module_t; 由其定义看到,其第一个成员为hw_module_t common,即上面说的自己的硬件抽象模块必须包含hw_module结构,达到“继承”的目的。另外定义了几个自己的成员变量,比如获取camera个数,及camera信息等。使用hw_get_module获取到的camera_module_t变量位于平台的camera HAL实现库中,不同的厂家可能文件名字有所不同,但是肯定会实现下面类似的结构(CameraHAL.cpp)。
camera_module_t HAL_MODULE_INFO_SYM __attribute__ ((visibility("default"))) = { common : { tag : HARDWARE_MODULE_TAG, module_api_version : CAMERA_MODULE_API_VERSION_2_0, hal_api_version : HARDWARE_HAL_API_VERSION, id : CAMERA_HARDWARE_MODULE_ID, name : "Default Camera HAL", author : "The Android Open Source Project", methods : &gCameraModuleMethods, dso : NULL, reserved : {0}, }, get_number_of_cameras : get_number_of_cameras, get_camera_info : get_camera_info, set_callbacks : set_callbacks }; 有了Camera的HAL层的硬件抽象模块camera_module,就可以通过camera_module获取到硬件抽象设备camera_device_t,不过它封装在CameraHardwareInterface中,在连接一个camera时(CameraService的connect函数,最后调到CameraClient::initialize),将先创建CameraHardwareInterface对象,然后在其初始化函数中得到camera_device_t:int rc = module->methods->open(module, mName.string(), (hw_device_t **)&mDevice);这个open函数就是gCameraModuleMethods里面的open函数,其实现如下所示:
int Camera::open(const hw_module_t *module, hw_device_t **device) { ALOGI("%s:%d: Opening camera device", __func__, mId); CAMTRACE_CALL(); pthread_mutex_lock(&mMutex); if (mBusy) { pthread_mutex_unlock(&mMutex); ALOGE("%s:%d: Error! Camera device already opened", __func__, mId); return -EBUSY; } // TODO: open camera dev nodes, etc mBusy = true; mDevice.common.module = const_cast<hw_module_t*>(module); *device = &mDevice.common; pthread_mutex_unlock(&mMutex); return 0; } 这里面就返回了camera_device_t,而此结构的初始化在构造函数中:
</pre> <pre>Camera::Camera(int id) : mId(id), mStaticInfo(NULL), mBusy(false), mCallbackOps(NULL), mStreams(NULL), mNumStreams(0), mSettings(NULL) { pthread_mutex_init(&mMutex, NULL); pthread_mutex_init(&mStaticInfoMutex, NULL); memset(&mDevice, 0, sizeof(mDevice)); mDevice.common.tag = HARDWARE_DEVICE_TAG; mDevice.common.version = CAMERA_DEVICE_API_VERSION_3_0; mDevice.common.close = close_device; mDevice.ops = const_cast<camera3_device_ops_t*>(&sOps); mDevice.priv = this; } 至此,CameraService就得到了Camera的HAL层的硬件抽象模块camera_module_t和抽象设备camera_device_t。有了这两个结构,上层就可以使用camera的功能了。以上代码基于android4.4/hardware/libhardware/modules/camera,使用的是c++的方式实现,不同硬件厂家的实现方式可能不同,但相同的是都必须实现这两个结构。
5. 总结
- HAL通过hw_get_module来获取hw_module_t结构。
- HAL通过hw_module_t->methods->open获取hw_device_t指针,并在在open中初始化hw_device_t中的结构,包括函数指针(close操作)等。
- 两个重要结构:
hw_module_t:硬件抽象模块,可以用hw_get_module获取到。其中又包含了一个hw_module_methods_t结构,其中定义了打开设备open方法。
hw_device_t:硬件抽象设备,主要定义了硬件相关的一些函数,参数等。此结构通过hw_module_methods_t里面定义的open函数获取。
以上大致就是android hal模块的内容,下一篇会以android的一个重要的HAL模块gralloc来看看其具体的实现。
查看详情
关注微信公众平台:程序员互动联盟(coder_online),你可以第一时间获取原创技术文章,和(java/C/C++/Android/Windows/Linux)技术大牛做朋友,在线交流编程经验,获取编程基础知识,解决编程问题。程序员互动联盟,开发人员自己的家。

正文到此结束
热门推荐










相关文章

近期评论
-
你这基本没有更新呀,最近文章显示还是2019年的文章。不符合要求哈
-
关键词:慕云博客 链接:https://www.lilun.me 描述:分享原创文字的个人博客
-
-
-
可以提供一下源码吗
-
不是商业站,鸡娃学习笔记
-
-
-
-
听他们说很厉害的样子
Loading...
![[HBLOG]公众号](http://www.liuhaihua.cn/img/qrcode_gzh.jpg)

