JDK8源码分析——并发库核心AbstractQueuedSynchronizer的实现思路
原创作品未经作者同意严禁私自转载,或私自修改后据为自有。违者将追究法律责任
Ⅰ. AQS 简介
AbstractQueuedSynchronizer 是JDK并发包的核心类,大多数并发工具实现如 CountDownLatch 、 Semaphore 、 ReentrantLock 等等在内部都持有 AQS 的子类,也就是说它们的功能都是在 AQS 的基础上实现的。
这个类由并发专家 Doug Lea 编写,关于这个同步器他还写了一篇专门的文章讲述它的设计
《 The java.util.concurrent Synchronizer Framework 》
Ⅱ. 基本设计
AQS 是以 FIFO 队列为基础的多线程同步器。当线程未能成功获得 许可 时( 许可 数量用尽)就会加入内部的 FIFO 队列中等待,直到有其他线程释放了 许可 。
这个队列实际上是一个 CLH锁 ,并且做了些必要的改进以达到以下目标
- 处于
park状态的线程可以被队列前驱唤醒 - 处理队列节点中线程取消等待的情况
-
CLH一般用于自旋,而AQS的设计原则是尽可能减少线程自旋节约资源
还有很重要的一点, AQS 提供了两种同步模式—— 独占 和 共享 , 独占 就是一次只能有一个线程获得 许可 ,而 共享 则是可以有多个线程获得 许可 。例如 WriteLock 是独占的, ReadLock 是共享的
本文只关注于 AQS 的核心实现,如果读者在阅读过程中发现不理解的概念或名词,还请自行搜索相关资料。
Ⅲ. FIFO队列
首先请大家一定明确一个概念:线程只会在未能成功获得 许可 的情况下才会入队列,就比如对一个 Lock 对象作 Lock.lock() 操作,
如果这个锁已经被别的线程持有了,即 许可 用完了,那么当前线程才会进入队列等待。
在 AQS 里,队列的节点用内部类 Node 表示,它的结构如下
static final class Node {
volatile int waitStatus; // 当前节点的状态
volatile Node prev; // 前驱节点
volatile Node next; // 后继节点
volatile Thread thread; // 当前等待线程
Node nextWaiter; // 用于Condition.await()
final Node predecessor() {...}
final boolean isShared() {...}
}
下面这张图展示了多个线程等待获得 许可 的情况
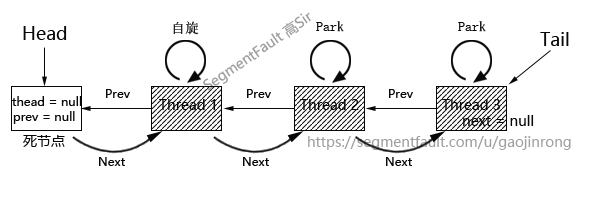
我们来看看 Node 类的核心 waitStatus 字段,这个字段表达的含义很丰富,所以很难用寥寥几句概括它,不同的值反映了 AQS 不同的行为模式
| waitStatus取值 | 表示 | 含义 | 特别说明 |
|---|---|---|---|
| 1 | Cancelled | 当前线程已经取消等待 | N/A |
| 0 | 初始状态 | 当线程新创建一个 Node 对象时,这个字段处于起始状态 |
N/A |
| -1 | Signal | 当前线程在取消等待或者获得许可时,必须对第一个非Cancel状态的后继节点执行 Unpark 操作 |
用于 AQS 的独占模式 |
| -2 | Condition | 表示当前线程在Condition对象上等待 | N/A |
| -3 | Propagate | 当前线程在取消等待或者获得许可时,必须将 许可还有机会获得 的信息通知后继的节点,这个信息会尽可能地向后"冒泡" |
用于 AQS 的共享模式 |
我们来聊一下什么是 park 和 unpark ,大家都知道 Thread.sleep() 的作用是让当前线程睡眠,而 LockSupport.park() 则更进一步,按照它的注释说明,这个方法的作用是将当前线程移出 线程调度器 。
也就是说执行了 park 方法,当前线程会立刻停止,不再执行后续代码,即使你调用 interrupt() 也无法将其"唤醒",因为它已经不在 线程调度器 中了。
如果需要让这个线程回到调度器中,需要使用 LockSupport.unpark(thread) 方法。
现在让我们忘记这些看不懂的东西吧,跟着我从原始的锁实现开始,一步步完善它,最后相信你会明白这一节说的是什么。
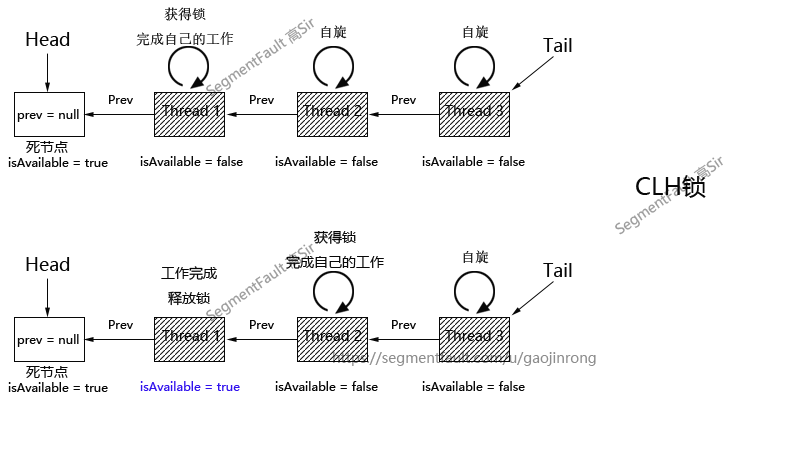
Ⅳ. 原始的锁实现——CLH锁
我们先从最简单的锁实现开始,话不多说,一图胜千言
节点数据结构如下
/* 节点结构 */
class Node {
Node prev;
boolean isAvailable;
}
每个节点的线程在等待锁和释放锁时分别执行的代码如下
/* 入队操作 */
public void enque(Node node) {
for (;;) {
Node t = tail;
node.prev = t;
if (CAS(tail, t, node))
return;
}
}
/* 获取锁操作 */
public Node lock() {
//建立节点插入队列尾部
Node node = new Node();
enque(node);
// 当prev.isAvailable是false时,表示前驱线程正在占用锁
while (!node.prev.isAvailable) {
}
return node;
}
/* 释放锁操作 */
public void unlock(Node node) {
node.isAvailable = true;
}
结构上, CLH 节点与前面的 Node 节点最大区别在于 CLH 没有 next 引用,只有一个 prev 前驱引用。
实现上, CLH 中每个节点的线程都在 自旋
这就造成了四个问题
-
CLH的线程都在自旋,浪费了很多CPU资源,并且浪费的程度与队列中线程数量成正比 -
CLH无法清除无用的节点,不具备伸缩性,在高并发情况下很快就会因为FIFO队列太长导致OOM - 如果
CLH中某个节点的线程不想继续等待,希望退出队列,以CLH的数据结构无法满足 -
CLH的设计只考虑了独占模式,即一次只能有一个线程获得许可,无法用于共享模式
其实这些问题的本质都在于 CLH 没有提供操作后继节点的途径
如果读者不能理解为什么会有上面这四个问题,还请配合图示仔细考察 CLH 的实现
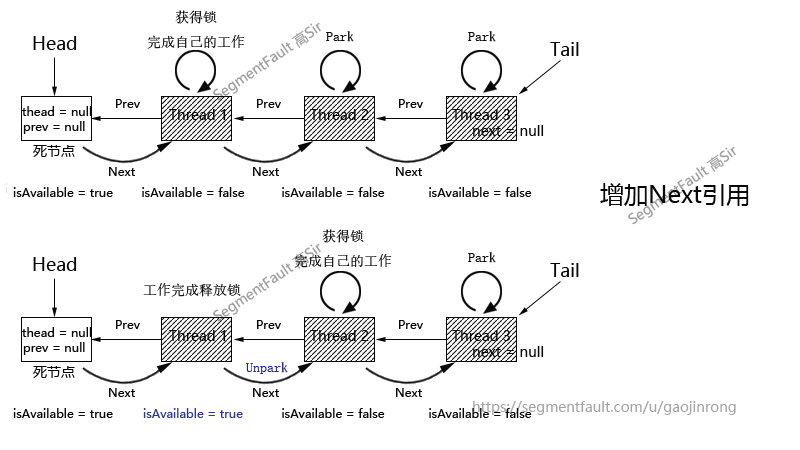
Ⅴ. 从减少自旋开始
首先要解决的当然是减少浪费CPU的问题了。要做到这个就意味着,线程需要使用 park 操作,而这进一步意味着必须有其他线程对其作 unpark 操作。
根据 CLH 的实现,这个 其他线程 就是前驱线程。所以我们改进节点的数据结构,为每个节点都增加一个 next 引用,为了能对后继线程执行 unpark ,还需要一个 thread 引用
/* 节点结构 */
class Node {
Node prev;
Node next;
Thread thread;
boolean isAvailable;
}
对应的操作当然也需要改进
/* 入队操作 */
public void enque(Node node) {
for (;;) {
Node t = tail;
node.prev = t;
if (CAS(tail, t, node)) {
t.next = node;
return;
}
}
}
/* 获取锁操作 */
public Node lock() {
Node node = new Node(Thread.currentThread());
enque(node);
while (!node.prev.isAvailable)
LockSupport.park(this);
return node;
}
/* 释放锁操作 */
public void unlock(Node node) {
node.isAvailable = true;
if (node.next != null)
LockSupport.unpark(node.next.thread);
}
用图说话就是这样
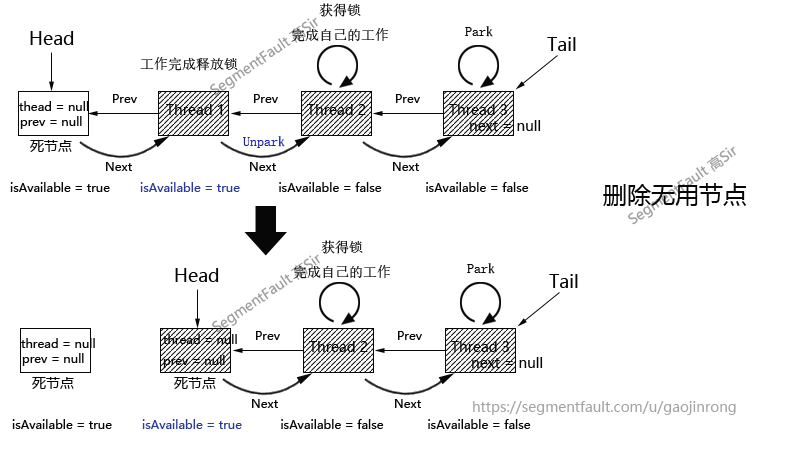
Ⅵ. GC的呐喊——清除无用的节点
显而易见,按照上面这张图的做法,如果处于高并发的环境中,这个队列分分钟就要爆炸了。我已经能听到垃圾收集器在骂我傻X了,额,我承认我是的,因为这样的设计根本不能用于真实环境。
所以接下来我们要将已经释放锁的节点移出队列,然后把这些节点狠狠塞到垃圾收集器那张让人憎恶,哦不,可爱的大嘴里,最好再给他一大耳刮子
大家第一个想到的应该就是双向链表的删除操作,不过让人欣慰的是,我们只需要在队列中的第一个节点上施加删除操作就可以了,因为不需要考虑并发,代码简单得令人发指
/* 清除无用的节点 */
public void setHead(Node node) {
head = node;
node.prev.next = null;
node.prev = null;
node.thread = null;
}
当然释放锁的步骤得更新一下
/* 释放锁操作 */
public void unlock(Node node) {
node.isAvailable = true;
setHead(node);
if (node.next != null)
LockSupport.unpark(node.next.thread);
}
配合图解,味道更佳
Ⅶ. 烦躁!老子不想再等了!
最近有许多线程跑到我的办公室对我破口大骂,就差掀我桌子了。他们一致认为我设计的 CLH 锁太特么烂了,因为他们一旦进队列了,就必须等到前驱释放锁才能继续他们的工作。
“你个损塞,懂不懂用户体验?!” “日他的前驱,拿了锁啥事不干,在那死循环呢?!都一个小时了,海贼王都完结了还没好!哪个傻X设计的锁!”
为了避免长时间等待锁,线程们召开第88届Thread代表大会,会议上代表们一致认为我需要提供一个可以中途退出等待的机制。
说实话,这个可不是个简单的任务,但是面对代表们人手一把的40米大刀,我好像没有第二条路了。
超时等待很好实现, LockSupport.parkNanos() 提供了相应的功能,然而超时之后怎么把自己从队列中移除是个难题,因为这个时候你得考虑其他节点也会并发退出的情况。
我们先来看这段代码
/* 退出等待 */
public void cancelAcquire(Node node) {
node.prev.next = node.next;
node.next.prev = node.prev;
node.prev = null;
node.next = null;
node.thread = null;
}
这是个标准的链表删除操作,但是这段代码没法用在并发退出的情形下。因为这四个步骤不是原子的,在步骤间隙没法确定其他节点会做什么操作。比如下面这样,假设A和B两个节点都要退出等待,那么就会...
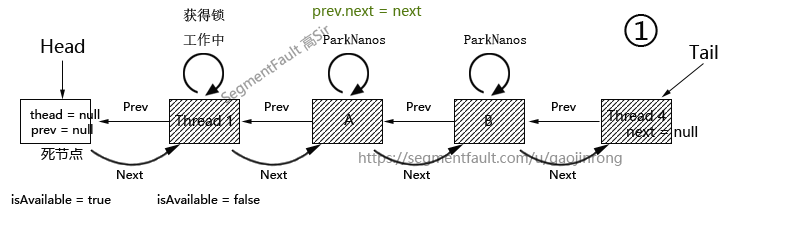
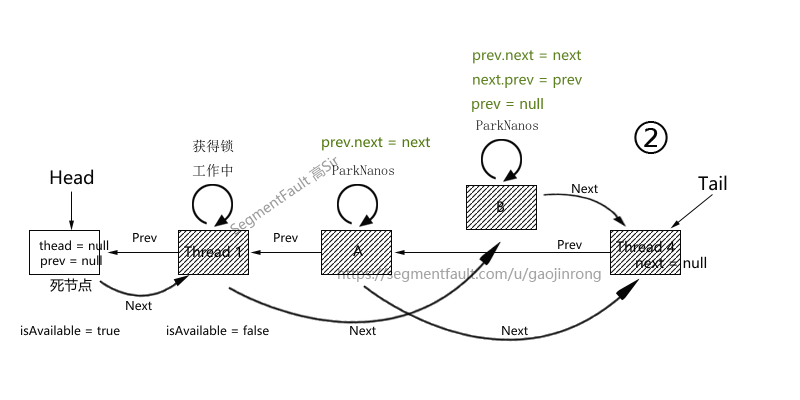

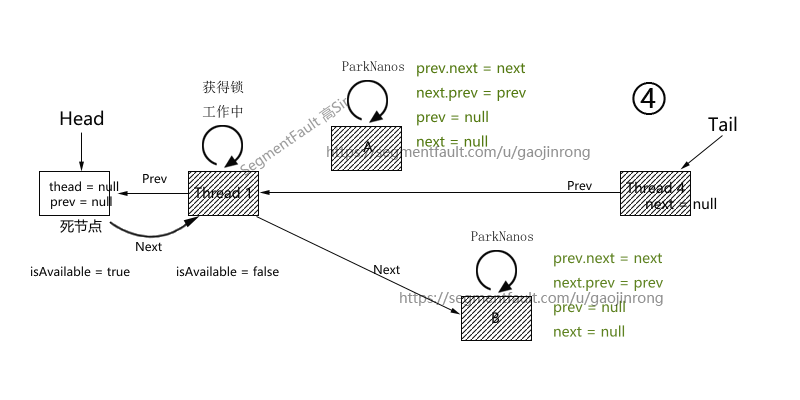
最后我们发现队列已经被破坏了,上图只是众多情况中的一种,想要凭脑力找出所有的潜在并发场景几乎是不可能的,至少对我来说是这样,毕竟我的脑袋不太灵光,只能以单核模式缓慢运行。
所以,下面的问题就是,怎样保证在并发退出的情况下,还能正确保持队列的完整性。这个时候我的心里已经开始在嘀咕了:真的存在这样的方法么?不行啊怎么想都没法做到唉!40米大刀我能跑得过么?
仔细思考下,想要依靠链表删除操作完成并发退出是不可行的,因为这里没有可以利用CAS进行原子隔离的操作空间。
为了能让并发情况可控,我们需要减少退出操作所涉及的引用,所以我们先尝试在退出时只操作一个方向的引用,因为队列末尾的节点next是空,所以我们为了避免null判断,退出时操作前驱的next引用
/* 退出等待 */
public void cancelAcquire(Node node) {
Node pred = node.prev;
Node prevNext = pred.next;
Node next = node.next;
CASNext(prevNode, prevNext, next);
}
似乎已经没法继续降低退出操作所涉及的引用了,毕竟本质上就是把节点从链表中移除,怎么也得操作到前驱的next引用和当前节点的next引用。
即便是这样,还是会出现并发下有节点不能正确退出,不过这是显而易见的结果 —— 每个节点设置前驱next引用的过程都是相互独立的,根本无法保证先后顺序。
所以现在我们可以做一个推理,如果真的存在一个方法能够实现并发退出,那么这个方法肯定不能仅靠更改引用,还必须有其他措施来使得节点能识别出已退出的节点。
/* 退出等待 */
public void cancelAcquire(Node ndoe) {
Node pred = node.prev;
while (pred.status == cancelled)
node.prev = pred = pred.prev; /* 假设Head的status不为Cancelled */
Node predNext = pred.next;
Node next = node.next;
node.status = Cancelled;
if (pred.status != Cancelled) {
if (next == null || next.status != Cancelled)
CASNext(pred, predNext, next); /* 假设这步失败了,说明有后续节点抢先完成了退出,这时候本节点已经被跳过了 */
}
node.next = null;
node.thread = null;
}
这个方法很有意思,它在 node.status = Cancelled 之后,作了一个双向检查,这样就可以保证,相邻两个节点并发退出时,到 node.status = Cancelled 代码之后,其中一个必然能检测到另一个处于Cancelled状态。再仔细分析,我们惊喜地发现,这个方法保证了连续的一串节点并发退出时,必定能有
1. 全部节点`status = Cancelled` 2. 在下次后续节点退出时,会直接跳过`status = Cancelled`节点
不过这里就有个问题,非Cancelled节点的next引用可能指向了一个处于Cancelled的无用节点, unpark 操作就无法对正确的等待线程施行。
所以需要一个方法从Tail向前寻找离当前节点最近的非Cancelled节点
/* unpark非退出后继线程 */
public void unparkSuccessor(Node node) {
Node next = node.next;
if (next == null || next.status == Cancelled) {
next = null;
for (Node t = tail; t != null && t != node; t = t.prev)
if (t.status != Cancelled)
next = t;
}
if (next != null)
LockSupport.unpark(next);
}
Ⅷ. 累了,不更了
以上就是 AQS 独占模式的基本实现思路,当然我应该对第四个问题,怎么实现共享模式进行分析,不过基于以下几个原因
1. 高Sir我累了 2. Gao sir is tired 3. 共享模式的基本思路跟独占是一样的
加上这篇文章在草稿箱也快两个礼拜了,我也不想再画图了,就这样发表吧,大家好好阅读源代码,很多细节我都省略了,有问题评论下方交流。
正文到此结束
热门推荐









相关文章

近期评论
-
ws0132613@gmail.comhttps://getmacos.com/gopanel/william smith
-
谢谢
-
https://www.newcmy.com/register?aff=HBVX建议您试试草莓云机场,可以流畅观看youtube和tiktok,上reddit/x也没有问题,还有各种ai优化节点。
-
-
-
想购买您这个站,我的联系方式QQ741756694微信同步 能卖联系
-
-
-
-
Loading...
![[HBLOG]公众号](https://www.liuhaihua.cn/img/qrcode_gzh.jpg)

