斯坦福研究人员研制出能理解人行道复杂路况的机器人

英文原文:Stanford’s ‘Jackrabbot’ robot will attempt to learn the arcane and unspoken rules of pedestrians
有时对于一个成年人类来说,如何在人群中确定方向都是一件挺难的事,呆笨的机器人就更不用说了。为了避免将来机器人撞到一起或遇到要选择走哪个方向的情况,斯坦福大学的研究人员正在开发一个叫 “Jackrabbot”的机器人 ,希望它能理解道路上的规则。
这个研究团队隶属于计算机视觉和几何学实验室(Computational Vision and Geometry Lab),曾开发过用于追踪和预测行人活动的计算机视觉算法。但道路上的规则太复杂,并且会受到诸多变量的影响,比如人群、人行道的宽度、一天中的时间以及路上是否有自行车或婴儿车——和任何机器学习任务一样,海量的数据才能产生有用的结果。
另外,研究人员正在开发的这种算法打算完全依靠一个神经网络解读出的观测数据,不允许研究人员向机器人发出在他们看来显而易见的提示(比如“在这种情况下,人当然会左转”)来调整机器人的前进方向。
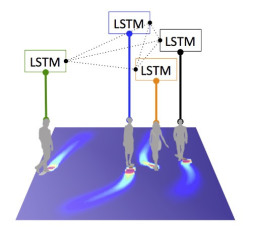
研究团队在一篇 论文 中详细介绍了到目前为止的研究成果,并将在本月底召开的 计算机视觉与模式识别大会(CVPR)上展示研究成果。他们开发的运动预测算法优于其他很多算法,他们的模型也已经掌握了一些不同人群如何互动的复杂情况。
目前,衣着华丽的 Jackrabbot 是由人工操控的,研究人员正在试着把他们的模型与机器人的感官整合起来。Jackrabbot 是由 Segway RMP210 改装的,装有几个立体相机、一个激光扫描仪以及 GPS。它无法获得训练数据那样的俯瞰视角,但如果知道速度和距离,它应该能够计算出路上每个人在空间中的坐标,并以与训练数据相似的精确度预测人的运动。

研究人员亚历山大·阿拉(Alexandre Alahi)在给 TechCrunch 的邮件中说:“我们计划在今年夏天将我们的人群感知预测模型整合到机器人中,在年底前做好一个实时演示机器人。”
能在人类活动空间中穿梭的机器人虽然还未走进日常生活,但已经开始从科幻小说中的场景变成现实。但是,那些我们不假思索一直在做的事,比如扫视我们周围的环境、评估环境中的障碍物和参与者、并据此计划我们的运动,对于计算机来说都是非常困难的。
这样的研究项目将与其他大量的研究一道,最终使机器人能像我们一样在房间里和城市中快速、安全地自由穿梭,同时体谅他人。就像自动驾驶汽车将彻底改变城市的街道一样,自动行人机器人(仿真或非仿真机器人)将改变人行道的面貌。
正文到此结束
热门推荐










相关文章






Loading...
![[HBLOG]公众号](http://www.liuhaihua.cn/img/qrcode_gzh.jpg)

