Hashmap源码解析-put
#### put
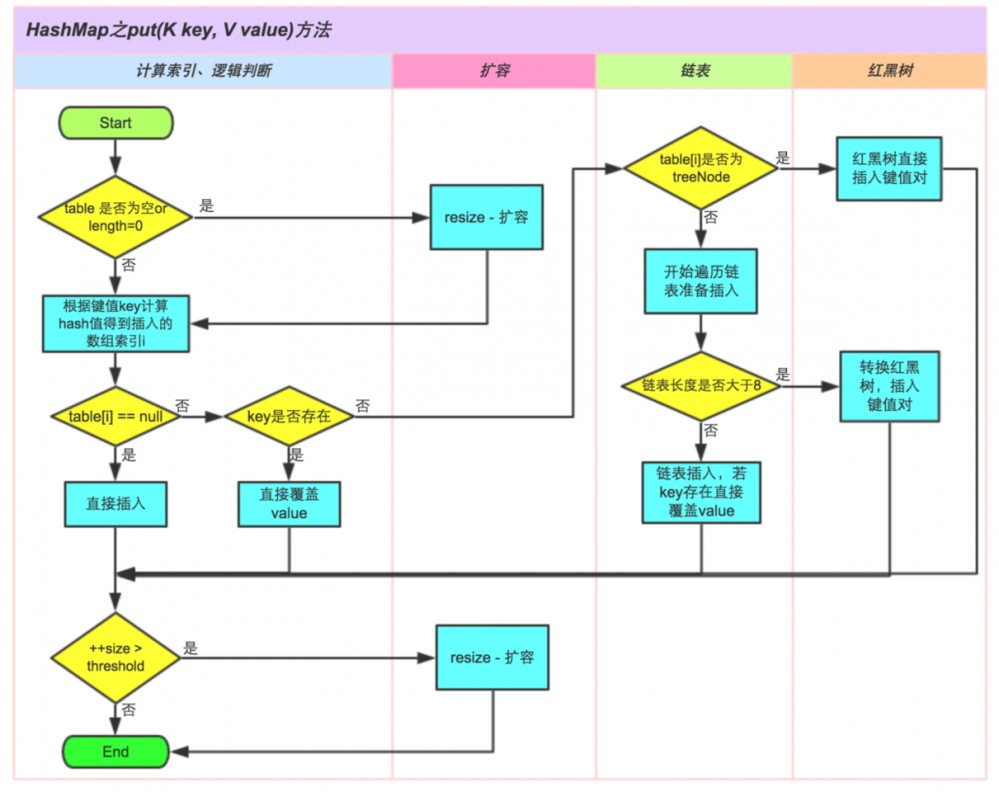
1.构造函数后的hashmap都是空的,size=0,只有在第一次put的时候,才会调resize扩容
2.index = (n - 1) & hash 实际是做了一个取模, 因为n是2的n次方, 所以n-1二进制都是1
3.if index节点为空,则new Node
else 哈希冲突
如果节点哈希值相等,key也相等,则是覆盖value操作
如果节点是树, 红黑树先不深入,反正就是做了查找插入或替换
如果是链表小于8,就遍历,插入或替换,注插入后如果链表长度大于8了,还要做treeifyBin转换为红黑树操作
4.然后++modCount, if (++size > threshold) resize();
5.扰动函数
hashcode散列值分布再松散,要是只取最后几位的话,碰撞也会很严重.
右位移16位,正好是32bit的一半,自己的高半区和低半区做异或,就是为了混合原始哈希码的高位和低位,以此来加大低位的随机性。而且混合后的低位掺杂了高位的部分特征,这样高位的信息也被变相保留下来。
Peter Lawley的一篇专栏文章《An introduction to optimising a hashing strategy》里的的一个实验,实验证明:在没有扰动函数的情况下,发生了103次碰撞,接近30%。而在使用了扰动函数之后只有92次碰撞。碰撞减少了将近10%。看来扰动函数确实还是有功效的。
源码:
public V put(K key, V value) {
//先根据key,取得hash值。 再调用上一节的方法插入节点
return putVal(hash(key), key, value, false, true);
}
static final int hash(Object key) {
int h;
return (key == null) ? 0 : (h = key.hashCode()) ^ (h >>> 16); // 扰动函数
}
final V putVal(int hash, K key, V value, boolean onlyIfAbsent,
boolean evict) {
//tab存放 当前的哈希桶, p用作临时链表节点
Node<K,V>[] tab; Node<K,V> p; int n, i;
//如果当前哈希表是空的,代表是初始化
if ((tab = table) == null || (n = tab.length) == 0)
//那么直接去扩容哈希表,并且将扩容后的哈希桶长度赋值给n
n = (tab = resize()).length;
//如果当前index的节点是空的,表示没有发生哈希碰撞。 直接构建一个新节点Node,挂载在index处即可。
//这里再啰嗦一下,index 是利用 哈希值 & 哈希桶的长度-1,替代模运算
if ((p = tab[i = (n - 1) & hash]) == null)
tab[i] = newNode(hash, key, value, null);
else {//否则 发生了哈希冲突。
//e
Node<K,V> e; K k;
//如果哈希值相等,key也相等,则是覆盖value操作
if (p.hash == hash &&
((k = p.key) == key || (key != null && key.equals(k))))
e = p;//将当前节点引用赋值给e
else if (p instanceof TreeNode)//红黑树暂且不谈
e = ((TreeNode<K,V>)p).putTreeVal(this, tab, hash, key, value);
else {//不是覆盖操作,则插入一个普通链表节点
//遍历链表
for (int binCount = 0; ; ++binCount) {
if ((e = p.next) == null) {//遍历到尾部,追加新节点到尾部
p.next = newNode(hash, key, value, null);
//如果追加节点后,链表数量》=8,则转化为红黑树
if (binCount >= TREEIFY_THRESHOLD - 1) // -1 for 1st
treeifyBin(tab, hash);
break;
}
//如果找到了要覆盖的节点
if (e.hash == hash &&
((k = e.key) == key || (key != null && key.equals(k))))
break;
p = e;
}
}
//如果e不是null,说明有需要覆盖的节点,
if (e != null) { // existing mapping for key
//则覆盖节点值,并返回原oldValue
V oldValue = e.value;
if (!onlyIfAbsent || oldValue == null)
e.value = value;
//这是一个空实现的函数,用作LinkedHashMap重写使用。
afterNodeAccess(e);
return oldValue;
}
}
//如果执行到了这里,说明插入了一个新的节点,所以会修改modCount,以及返回null。
//修改modCount
++modCount;
//更新size,并判断是否需要扩容。
if (++size > threshold)
resize();
//这是一个空实现的函数,用作LinkedHashMap重写使用。
afterNodeInsertion(evict);
return null;
}
putAll
public void putAll(Map<? extends K, ? extends V> m) {
//将另一个Map的所有元素加入表中,参数evict初始化时为false,其他情况为true
putMapEntries(m, true);
}
//将另一个Map的所有元素加入表中,参数evict初始化时为false,其他情况为true
final void putMapEntries(Map<? extends K, ? extends V> m, boolean evict) {
//拿到m的元素数量
int s = m.size();
//如果数量大于0
if (s > 0) {
//如果当前表是空的
if (table == null) { // pre-size
//根据m的元素数量和当前表的加载因子,计算出阈值
float ft = ((float)s / loadFactor) + 1.0F;
//修正阈值的边界 不能超过MAXIMUM_CAPACITY
int t = ((ft < (float)MAXIMUM_CAPACITY) ?
(int)ft : MAXIMUM_CAPACITY);
//如果新的阈值大于当前阈值
if (t > threshold)
//返回一个 》=新的阈值的 满足2的n次方的阈值
threshold = tableSizeFor(t);
}
//如果当前元素表不是空的,但是 m的元素数量大于阈值,说明一定要扩容。
else if (s > threshold)
resize();
//遍历 m 依次将元素加入当前表中。
for (Map.Entry<? extends K, ? extends V> e : m.entrySet()) {
K key = e.getKey();
V value = e.getValue();
putVal(hash(key), key, value, false, evict);
}
}
}
正文到此结束
热门推荐









相关文章

近期评论
-
出现OpenClaw "device signature expired"。the Gateway rejects if Math.abs(Date.now() - signedAt) > 10 * 60 * 1000 (10 minutes)
-
-
想购买您这个站,我的联系方式QQ741756694微信同步 能卖联系
-
-
-
博主的博客用的什么技术栈,内容都是干货,赞
-
-
https://www.liuhaihua.cn/archives/40657.html 这篇博客中的图片打不开了
-
不会英语啊。
-
Loading...
![[HBLOG]公众号](https://www.liuhaihua.cn/img/qrcode_gzh.jpg)

