基于密度的聚类之Dbscan算法
一.算法概述
DBSCAN(Density-Based Spatial Clustering of Applications with Noise)是一个比较有代表性的基于密度的聚类算法。与划分和层次聚类方法不同,它将簇定义为密度相连的点的最大集合,能够把具有足够高密度的区域划分为簇,并可在噪声的空间数据库中发现任意形状的聚类(笔者认为是因为他不是基于距离的,基于距离的发现的是球状簇)。
该算法利用基于密度的聚类的概念,即要求聚类空间中的一定区域内所包含对象(点或其他空间对象)的数目不小于某一给定阈值。DBSCAN算法的显著优点是聚类速度快且能够有效处理噪声点和发现任意形状的空间聚类。但是由于它直接对整个数据库进行操作且进行聚类时使用了一个全局性的表征密度的参数,因此也具有两个比较明显的弱点:
(1)当数据量增大时,要求较大的内存支持I/O消耗也很大;
(2)当空间聚类的密度不均匀、聚类间距差相差很大时,聚类质量较差(有些簇内距离较小,有些簇内距离很大,但是Eps是确定的,所以,大的点可能被误判断为离群点或者边界点,如果Eps太大,那么小距离的醋内,可能会包含一些离群点或者边界点,KNN的k也存在同样的问题)。
(1)与K-MEANS比较起来,不需要输入要划分的聚类个数;
(2)聚类簇的形状没有偏倚(这个不明白啥意思);
(3)可以在需要时输入过滤噪声的参数;
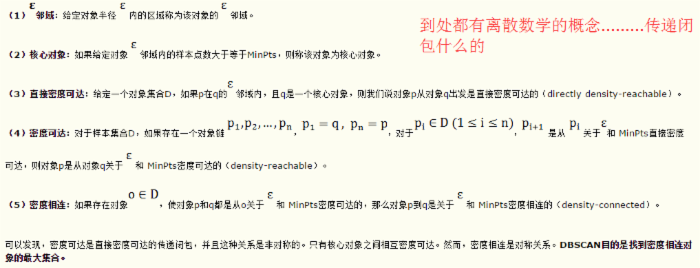
二.算法基本定义
三.算法描述
3.1 算法前提
DBSCAN算法基于一个事实:一个聚类可以由其中的任何核心对象唯一确定。等价可以表述为:任一满足核心对象条件的数据对象p,数据库D中所有从p密度可达的数据对象o所组成的集合构成了一个完整的聚类C,且p属于C。
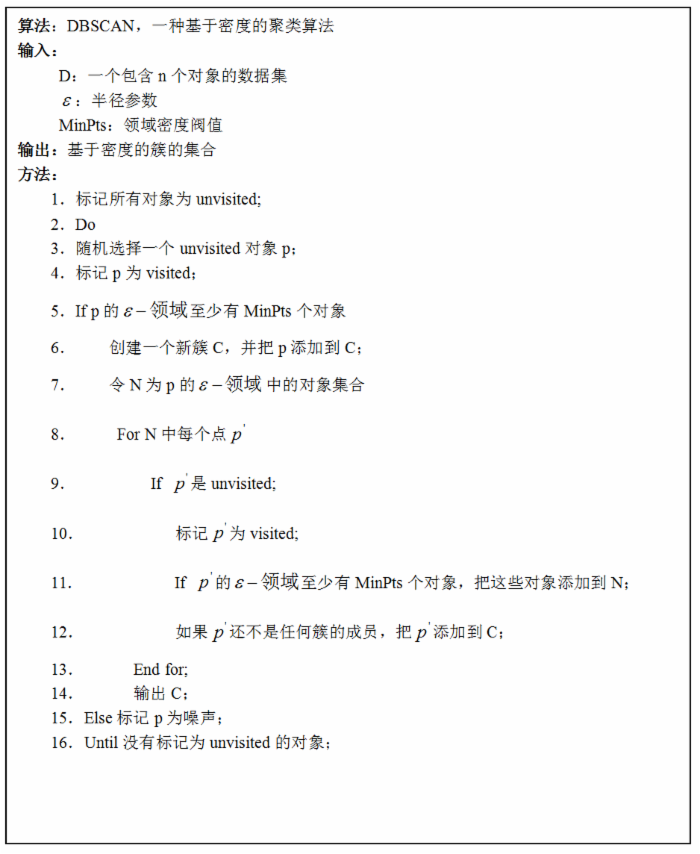
3.2 算法流程
四.算法实现
%% DBSCAN clear all; clc; %% 导入数据集 % data = load('testData.txt'); data = randn(50,2); % 定义参数Eps和MinPts MinPts = 5; Eps = epsilon(data, MinPts); [m,n] = size(data);%得到数据的大小 x = [(1:m)' data]; [m,n] = size(x);%重新计算数据集的大小 types = zeros(1,m);%用于区分核心点1,边界点0和噪音点-1 dealed = zeros(m,1);%用于判断该点是否处理过,0表示未处理过 dis = calDistance(x(:,2:n)); number = 1;%用于标记类 %% 对每一个点进行处理 for i = 1:m %找到未处理的点 if dealed(i) == 0 xTemp = x(i,:); D = dis(i,:);%取得第i个点到其他所有点的距离 ind = find(D<=Eps);%找到半径Eps内的所有点 %% 区分点的类型 %边界点 if length(ind) > 1 && length(ind) < MinPts+1 types(i) = 0; class(i) = 0; end %噪音点 if length(ind) == 1 types(i) = -1; class(i) = -1; dealed(i) = 1; end %核心点(此处是关键步骤) if length(ind) >= MinPts+1 types(xTemp(1,1)) = 1; class(ind) = number; % 判断核心点是否密度可达 while ~isempty(ind) yTemp = x(ind(1),:); dealed(ind(1)) = 1; ind(1) = []; D = dis(yTemp(1,1),:);%找到与ind(1)之间的距离 ind_1 = find(D<=Eps); if length(ind_1)>1%处理非噪音点 class(ind_1) = number; if length(ind_1) >= MinPts+1 types(yTemp(1,1)) = 1; else types(yTemp(1,1)) = 0; end for j=1:length(ind_1) if dealed(ind_1(j)) == 0 dealed(ind_1(j)) = 1; ind=[ind ind_1(j)]; class(ind_1(j))=number; end end end end number = number + 1; end end end % 最后处理所有未分类的点为噪音点 ind_2 = find(class==0); class(ind_2) = -1; types(ind_2) = -1; %% 画出最终的聚类图 hold on for i = 1:m if class(i) == -1 plot(data(i,1),data(i,2),'.r'); elseif class(i) == 1 if types(i) == 1 plot(data(i,1),data(i,2),'+b'); else plot(data(i,1),data(i,2),'.b'); end elseif class(i) == 2 if types(i) == 1 plot(data(i,1),data(i,2),'+g'); else plot(data(i,1),data(i,2),'.g'); end elseif class(i) == 3 if types(i) == 1 plot(data(i,1),data(i,2),'+c'); else plot(data(i,1),data(i,2),'.c'); end else if types(i) == 1 plot(data(i,1),data(i,2),'+k'); else plot(data(i,1),data(i,2),'.k'); end end end hold off 么么哒.............
%% 计算矩阵中点与点之间的距离 function [ dis ] = calDistance( x ) [m,n] = size(x); dis = zeros(m,m); for i = 1:m for j = i:m %计算点i和点j之间的欧式距离 tmp =0; for k = 1:n tmp = tmp+(x(i,k)-x(j,k)).^2; end dis(i,j) = sqrt(tmp); dis(j,i) = dis(i,j); end end end 么么哒.............
function [Eps]=epsilon(x,k) % Function: [Eps]=epsilon(x,k) % % Aim: % Analytical way of estimating neighborhood radius for DBSCAN % % Input: % x - data matrix (m,n); m-objects, n-variables % k - number of objects in a neighborhood of an object % (minimal number of objects considered as a cluster) [m,n]=size(x); Eps=((prod(max(x)-min(x))*k*gamma(.5*n+1))/(m*sqrt(pi.^n))).^(1/n); 注意:prod是数组内元素的乘积,A^n是A*A*....*A,A.^n是A中每个元素的n次方。
正文到此结束
热门推荐










相关文章






Loading...
![[HBLOG]公众号](http://www.liuhaihua.cn/img/qrcode_gzh.jpg)

